现有被动型和主动型膝关节假肢的一大共性缺点为截肢者-假肢耦合系统耗能高,其主要原因为这两种假肢均不能真正模拟健全膝关节原动肌群主被动混合作用的步态特征。本项目拟基于正常步态下的能量代谢特征,研究一种主被动混合驱动的新型仿生膝关节假肢的关键基础理论问题。通过研究智能膝关节假肢的仿生结构、人机耦合肌力重构动力学特性以及适应不同步态模式(路况)、步态时相及步速的智能控制方法,阐明仿生膝关节主被动混合驱动与顺应拟合人体正常步态及能量代谢特征的协调控制机理,为高仿生性膝关节假肢的研制建立具有应用价值的基础理论与方法。
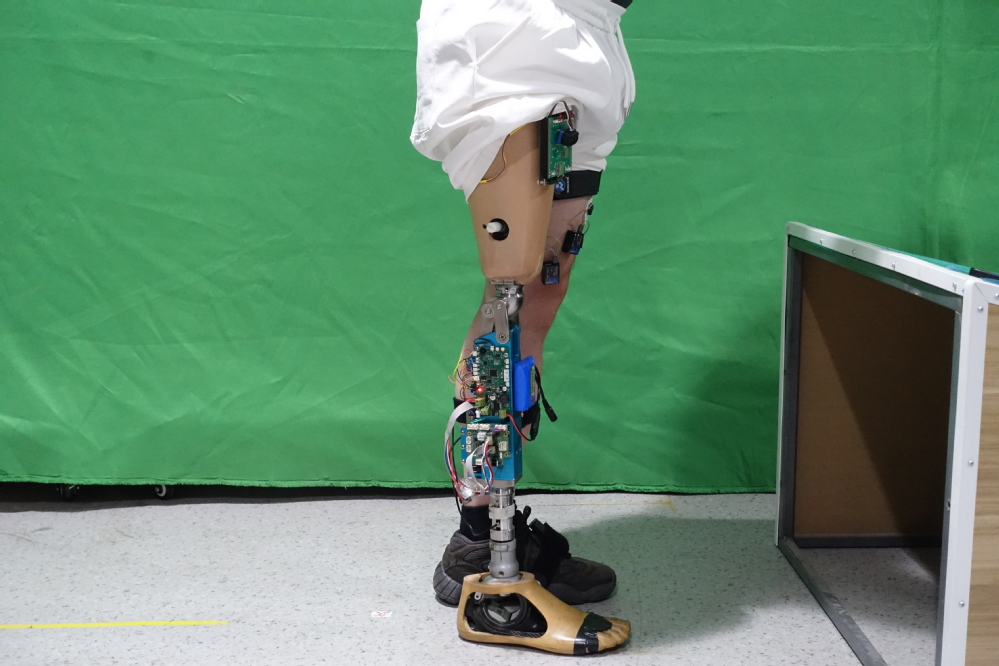
主被动混驱智能膝关节假肢(HPAK)是一款创新的混合被动-主动驱动单元的下肢假肢,专为大腿截肢患者设计,旨在改善他们的步行体验并减少能量消耗。这种独特的设计使得 HPAK 不仅能够在被动模式下流畅运行,还能在需要时提供必要的主动助力,确保患者拥有接近自然的步态。